ToT-Robotics-EV3
A proposed outline for a three session "Taste of Tech" course with EV3 (Mindstorms) LEGO robots.
Input and Output
Software and robots are only useful if they can interact with the real world. That means being able to do something meaningful (output) and/or processing some information (input). With most computers, output is limited to what they can display on their screens or play through their speakers. With robots, output can also include things like moving motors, blinking lights, heating elements, and a whole range of other behaviors.
Similarly, robots have more options when it comes to input. With your home computer the typical input comes from a keyboard, mouse, trackpad, or camera. Robots can use those devices plus they add a hole host of sensors like light sensors, color sensors, touch sensors, distance (ultrasonic) sensors, temperature sensors, gyroscopic sensors, and a number of others.
By selectively using these input and output devices we can program a robot to behave in certain ways. For example, we can use a robot to measure the distance to a specific object (input) and display its results on a screen (output); or, we can program a robot to play a sound (output) when it sees a specific color (input); or, we can simply program a robot to play a little tune (output). In these exercise, the students are going to do all of these things!
Code



Distance program not possible in iPad IDE
View the iPad Code (No Red, pt 1)
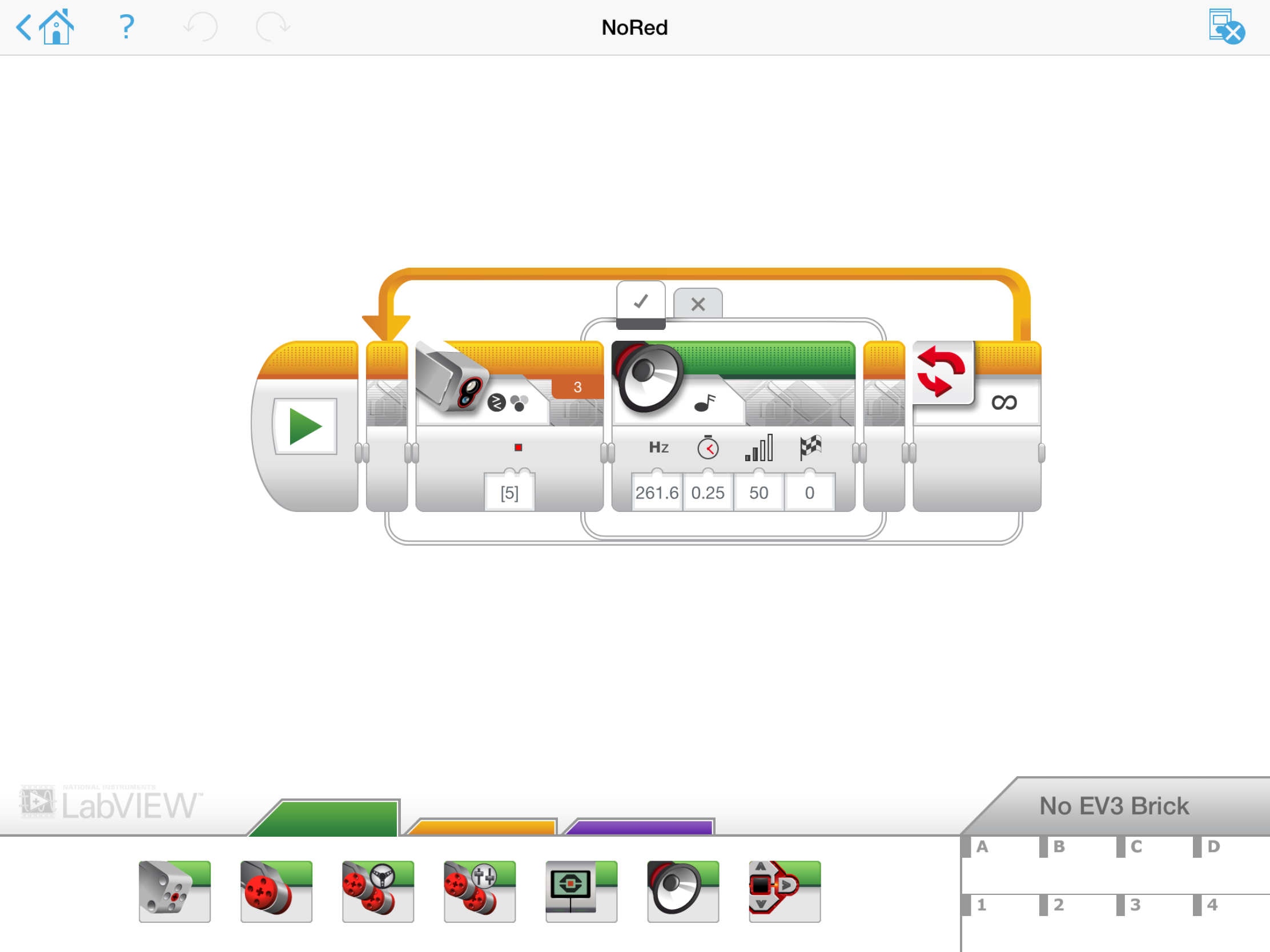{kind=link}
View the iPad Code (No Red, pt 2)
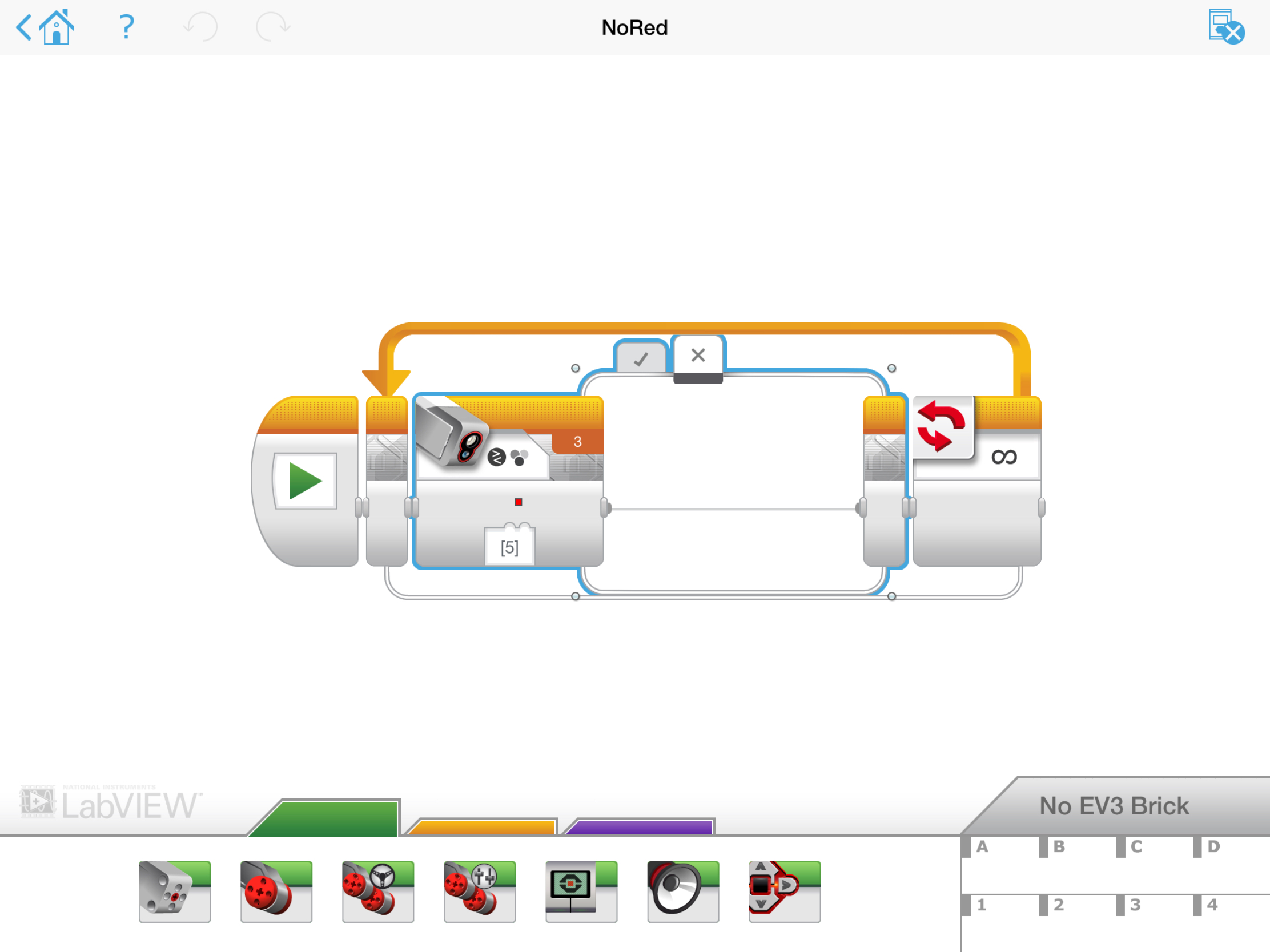{kind=link}
{kind=link}
Behavior
The Distance program will measure the distance to an object placed in front of the ultrasonic sensor and display that distance on the screen. The range is limited by the ultrasonic sensor’s sensitivity.
The No Red program will play a tone (as a warning) whenever it sees a specific color (red, as shown in the example).
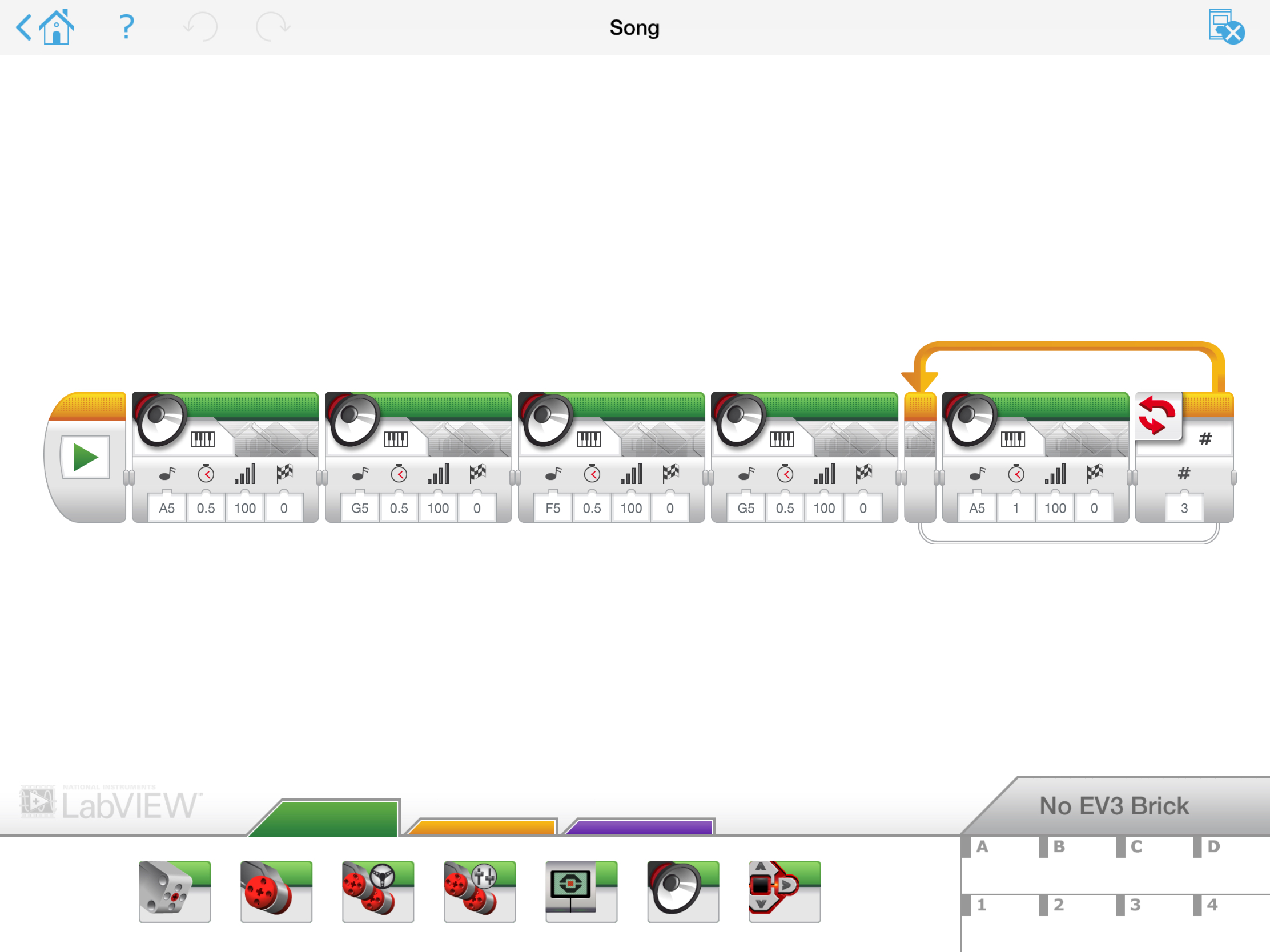
The Song program will play a few notes from a children’s tune. This is a good program to warm up with and you can ask the students to identify the song.